|
|
|
|
|
AmrCore Source Code: Details
Here we provide more information about the source code in amrex/Src/AmrCore.
AmrMesh and AmrCore
For single-level simulations
(see e.g., amrex-tutorials/ExampleCodes/Basic/HeatEquation_EX1_C/main.cpp)
the user needs to build Geometry, DistributionMapping,
and BoxArray objects associated with the simulation. For simulations
with multiple levels of refinement, the AmrMesh class can be thought
of as a container to store arrays of these objects (one for each level), and
information about the current grid structure.
amrex/Src/AmrCore/AMReX_AmrMesh.cpp/H contains the AmrMesh class.
The protected data members are:
protected:
int verbose;
int max_level; // Maximum allowed level.
Vector<IntVect> ref_ratio; // Refinement ratios [0:finest_level-1]
int finest_level; // Current finest level.
Vector<IntVect> n_error_buf; // Buffer cells around each tagged cell.
Vector<IntVect> blocking_factor; // Blocking factor in grid generation
// (by level).
Vector<IntVect> max_grid_size; // Maximum allowable grid size (by level).
Real grid_eff; // Grid efficiency.
int n_proper; // # cells required for proper nesting.
bool use_fixed_coarse_grids;
int use_fixed_upto_level;
bool refine_grid_layout; // chop up grids to have the number of
// grids be no less than the number of procs
Vector<Geometry> geom;
Vector<DistributionMapping> dmap;
Vector<BoxArray> grids;
The following parameters are frequently set via the inputs file or the command line. Their usage is described in the section on Grid Creation.
Variable |
Value |
Default |
|---|---|---|
amr.verbose |
int |
0 |
amr.max_level |
int |
none |
amr.max_grid_size |
ints |
32 in 3D, 128 in 2D |
amr.n_proper |
int |
1 |
amr.grid_eff |
Real |
0.7 |
amr.n_error_buf |
int |
1 |
amr.blocking_factor |
int |
8 |
amr.refine_grid_layout |
int |
true |
amr.max_grid_iterations |
int |
4 |
AMReX_AmrCore.cpp/H contains the pure virtual class AmrCore,
which is derived from the AmrMesh class. AmrCore does not actually
have any data members, just additional member functions, some of which override
the base class AmrMesh.
There are no pure virtual functions in AmrMesh, but
there are five pure virtual functions in the AmrCore class. Any applications
you create must implement these functions. The tutorial code
Amr/Advection_AmrCore provides a sample implementation in the derived
class AmrCoreAdv.
//! Tag cells for refinement. TagBoxArray tags is built on level lev grids.
virtual void ErrorEst (int lev, TagBoxArray& tags, Real time,
int ngrow) override = 0;
//! Make a new level from scratch using provided BoxArray and DistributionMapping.
//! Only used during initialization.
virtual void MakeNewLevelFromScratch (int lev, Real time, const BoxArray& ba,
const DistributionMapping& dm) override = 0;
//! Make a new level using provided BoxArray and DistributionMapping and fill
// with interpolated coarse level data.
virtual void MakeNewLevelFromCoarse (int lev, Real time, const BoxArray& ba,
const DistributionMapping& dm) = 0;
//! Remake an existing level using provided BoxArray and DistributionMapping
// and fill with existing fine and coarse data.
virtual void RemakeLevel (int lev, Real time, const BoxArray& ba,
const DistributionMapping& dm) = 0;
//! Delete level data
virtual void ClearLevel (int lev) = 0;
Refer to the AmrCoreAdv class in the
amrex-tutorials/ExampleCodes/Amr/AmrCore_Advection/Source
code for a sample implementation.
TagBox and Cluster
These classes are used in the grid generation process.
The TagBox class is essentially a data structure that marks which
cells are “tagged” for refinement.
Cluster (and ClusterList contained within the same file) are classes
that help sort tagged cells and generate a grid structure that contains all
the tagged cells. These classes and their member functions are largely
hidden from any application codes through simple interfaces
such as regrid and ErrorEst (a routine for tagging cells for refinement).
FillPatchUtil and Interpolater
Many codes, including the Advection_AmrCore example, contain an array of MultiFabs
(one for each level of refinement), and then use FillPatch operations to fill temporary
MultiFabs that may include a different number of ghost cells. FillPatch operations fill
all cells, valid and ghost, using actual valid data at that level, space-time interpolated data
from the next-coarser level, neighboring grids at the same level, and domain
boundary conditions (for examples that have non-periodic boundary conditions).
Note that at the coarsest level,
interior cells and domain boundaries (which can be periodic or prescribed based on physical considerations)
need to be filled. At non-coarsest levels, the ghost cells can also be interior or on the domain boundary,
but they can also be at coarse-fine interfaces away from the domain boundary.
AMReX_FillPatchUtil.cpp/H contains two primary functions of interest.
FillPatchSingleLevel()fills aMultiFaband its ghost region at a single level of refinement. The routine is flexible enough to interpolate in time between two MultiFabs associated with different times.FillPatchTwoLevels()fills aMultiFaband its ghost region at a single level of refinement, assuming there is an underlying coarse level. This routine is flexible enough to interpolate the coarser level in time first usingFillPatchSingleLevel().
Note that FillPatchSingleLevel() and FillPatchTwoLevels() call the
single-level routines MultiFab::FillBoundary and FillDomainBoundary()
to fill interior, periodic, and physical boundary ghost cells. In principle, you can
write a single-level application that calls FillPatchSingleLevel() instead
of using MultiFab::FillBoundary and FillDomainBoundary().
The FillPatchUtil routines use an Interpolator. This is largely hidden from application codes.
AMReX_Interpolater.cpp/H contains the virtual base class Interpolater, which provides
an interface for coarse-to-fine spatial interpolation operators. The fillpatch routines described
above require an Interpolater for FillPatchTwoLevels().
Within AMReX_Interpolater.cpp/H, the derived classes are:
NodeBilinearCellBilinearCellConservativeLinearCellConservativeProtectedCellConservativeQuarticCellQuadraticPCInterpFaceLinearFaceDivFree: This is more accurately a divergence-preserving interpolation on face-centered data, i.e., it ensures the divergence of the fine ghost cells matches the value of the divergence of the underlying coarse cell. All fine cells overlying a given coarse cell will have the same divergence, even when the coarse grid divergence is spatially varying. Note that when using this withFillPatchfor time sub-cycling, the coarse grid times may not match the fine grid time, in which caseFillPatchwill create coarse values at the fine time before calling this interpolation and the result of theFillPatchis not guaranteed to preserve the original divergence.
These Interpolaters can be executed on CPU or GPU, with certain limitations:
CellConservativeProtectedonly works in 2D and 3D.CellQuadraticonly works in 2D and 3D.CellConservativeQuarticonly works with a refinement ratio of 2.FaceDivFreeonly works in 2D and 3D and with a refinement ratio of 2.
Using FluxRegisters
AMReX_FluxRegister.cpp/H contains the class FluxRegister, which is
derived from the class BndryRegister (in amrex/Src/Boundary/AMReX_BndryRegister).
In the most general terms, a FluxRegister is a special type of BndryRegister
that stores and manipulates data (most often fluxes) at coarse-fine interfaces.
A simple usage scenario comes from a conservative discretization of a hyperbolic
system:
Consider a two-level, two-dimensional simulation. A standard methodology for
advancing the solution in time is to first advance the coarse grid solution
ignoring the fine level, and then advance the fine grid solution using the
coarse level only to supply boundary conditions. At the coarse-fine interface,
the area-weighted fluxes from the fine grid advance do not in general match the
underlying flux from the coarse grid face, resulting in a lack of global
conservation. Note that for subcycling-in-time algorithms (where for each coarse
grid advance, the fine grid is advanced \(r\) times using a coarse grid time
step reduced by a factor of \(r\), where \(r\) is the refinement ratio),
the coarse grid flux must be compared to the area and time-weighted fine grid
fluxes. A FluxRegister accumulates and ultimately stores the net
difference in fluxes between the coarse grid and fine grid advance over each
face over a given coarse time step. The simplest possible synchronization step
is to modify the coarse grid solution in the coarse cells immediately adjacent to
the coarse-fine interface to account for the mismatch stored in the
FluxRegister. This can be done “simply” by taking the coarse-level divergence of
the data in the FluxRegister using the reflux function.
The Fortran routines that perform the actual floating-point work associated with
incrementing data in a FluxRegister are contained in the files
AMReX_FLUXREG_F.H and AMReX_FLUXREG_xD.F.
AmrParticles and AmrParGDB
The AmrCore/ directory contains derived classes for dealing with particles in a multi-level framework. The description of the base classes are given in the chapter on Particles.
AMReX_AmrParticles.cpp/H contains the classes AmrParticleContainer
and AmrTracerParticleContainer, which are derived from the classes
ParticleContainer (in amrex/Src/Particle/AMReX_Particles)
and TracerParticleContainer (in amrex/Src/Particle/AMReX_TracerParticles).
AMReX_AmrParGDB.cpp/H contains the class AmrParGDB, which is derived from
the class ParGDBBase (in amrex/Src/Particle/AMReX_ParGDB).
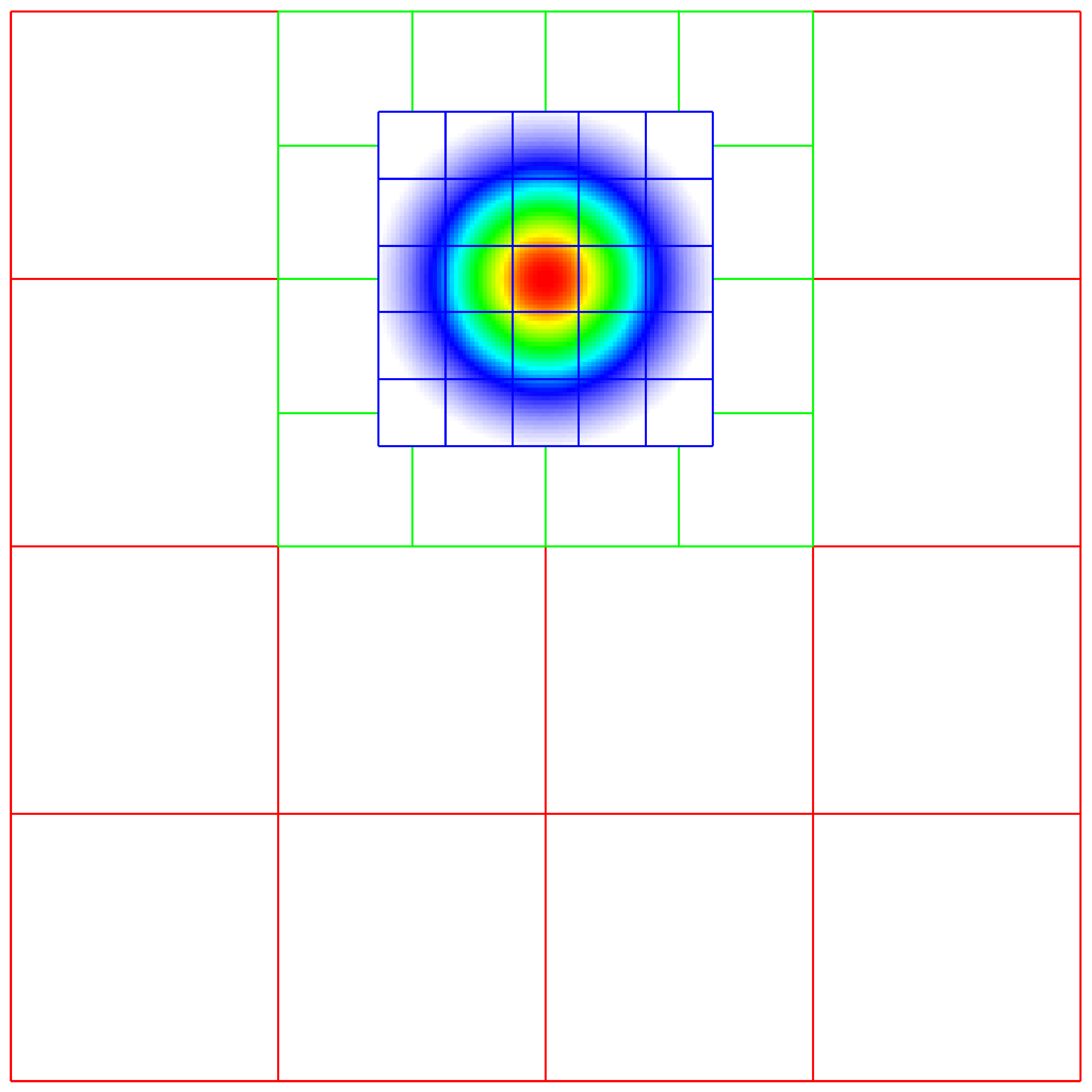
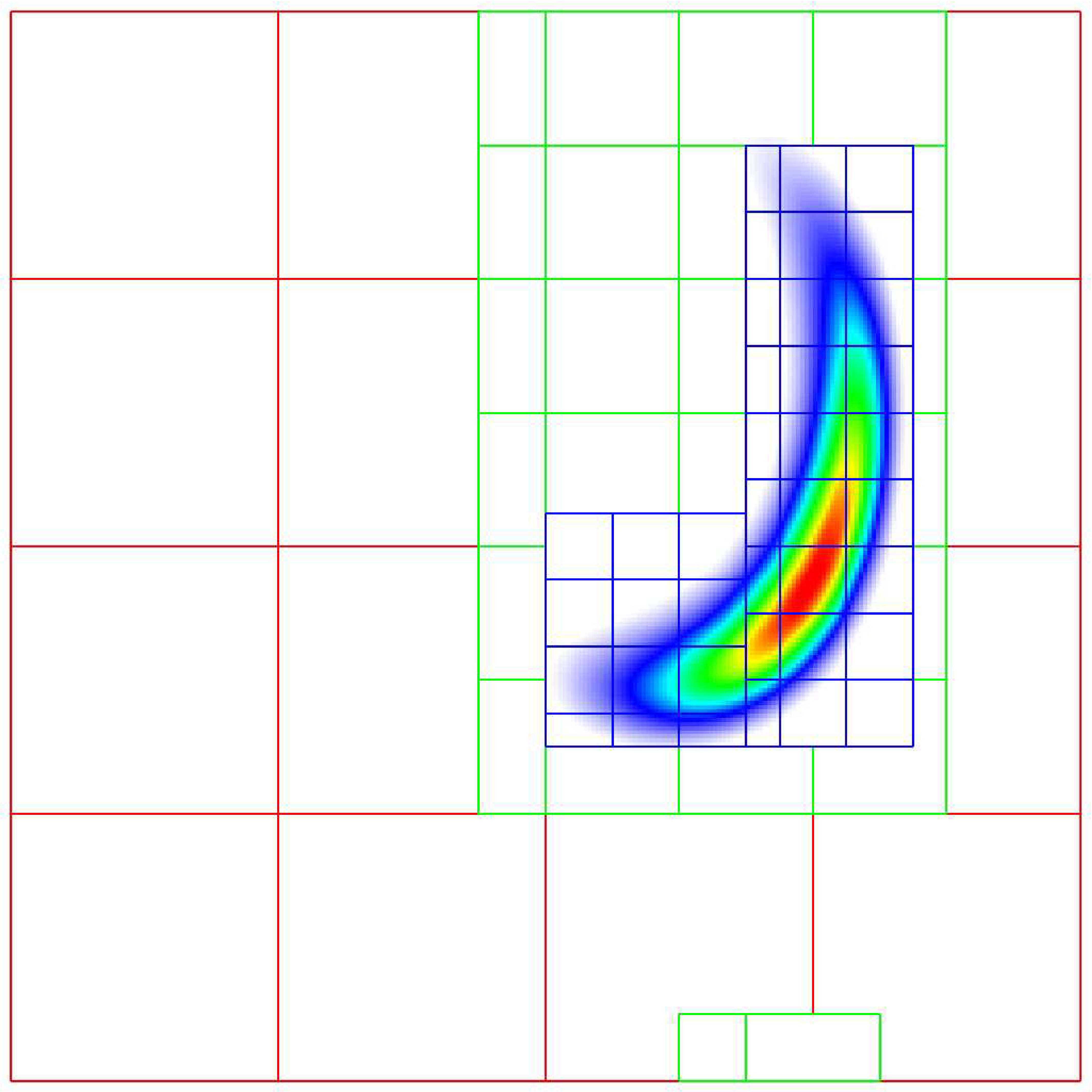
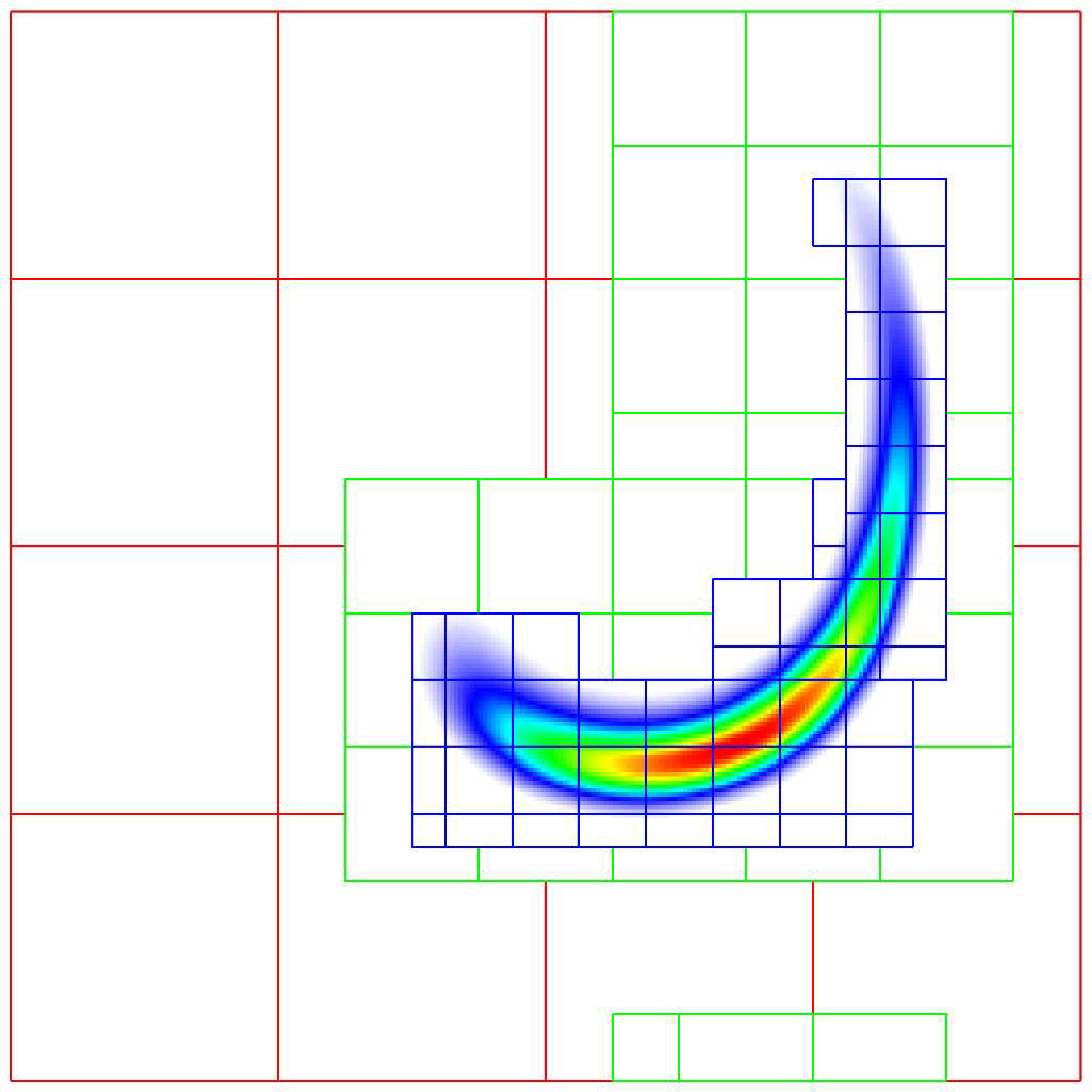
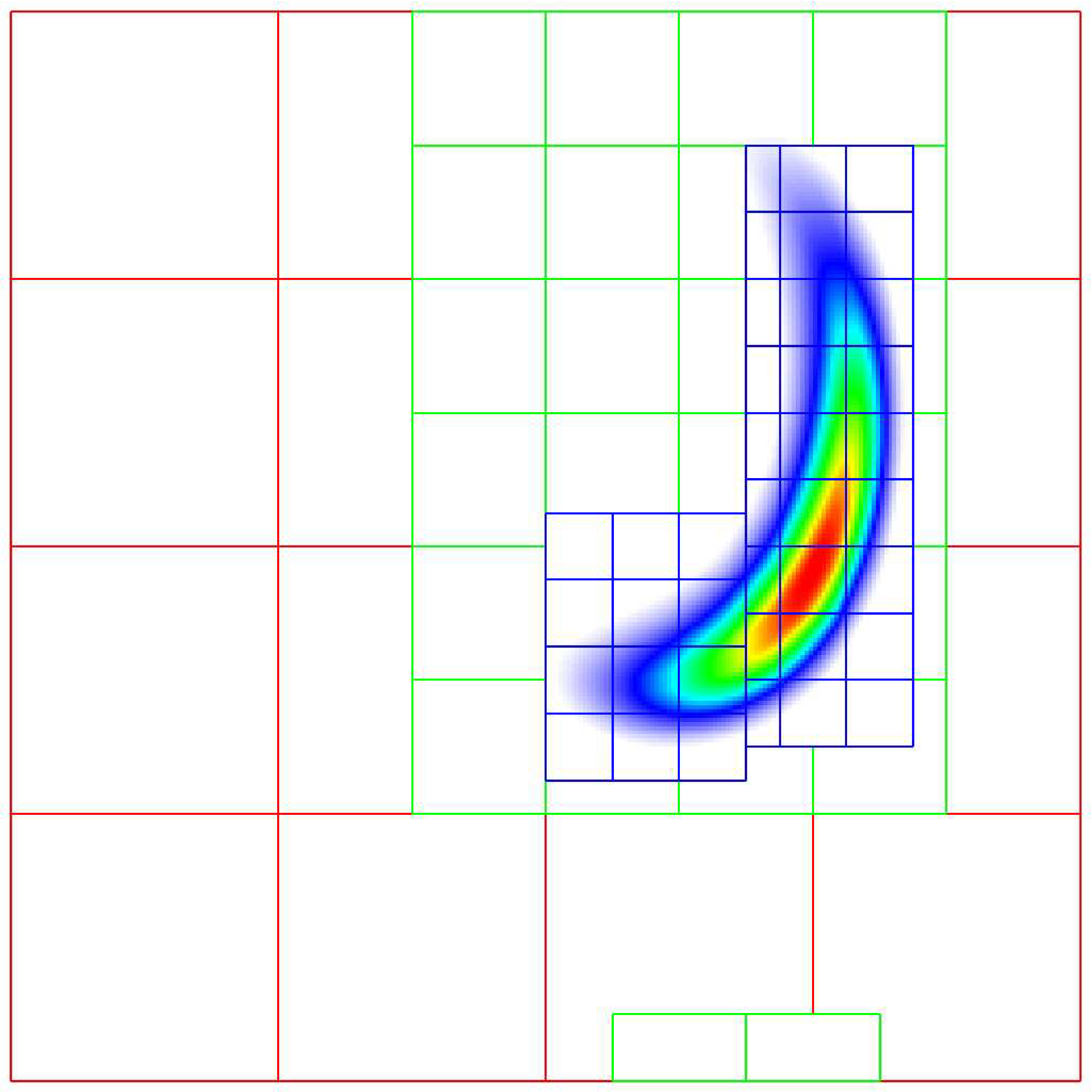
Example: Advection_AmrCore
The Advection Equation
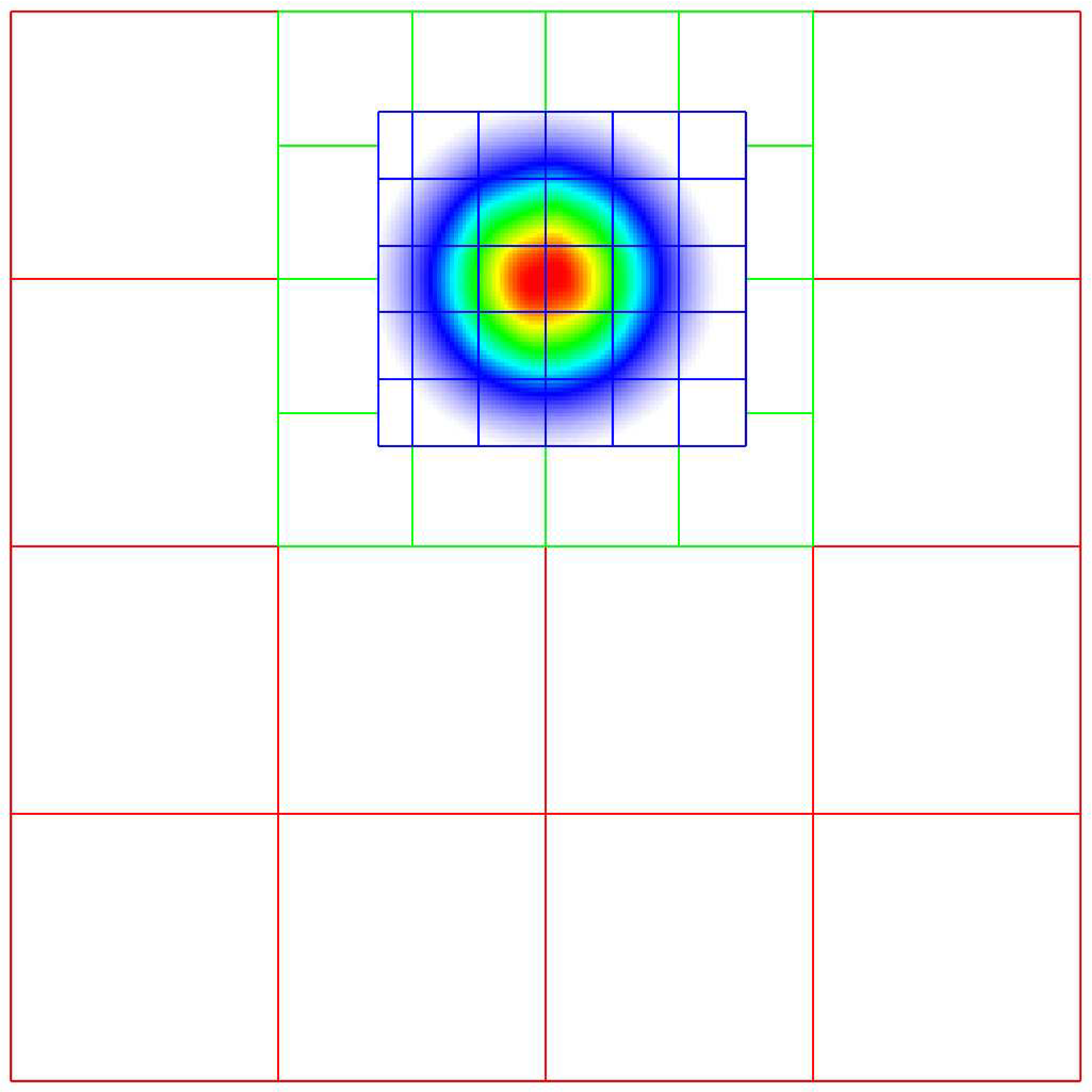
We seek to solve the advection equation on a multi-level, adaptive grid structure:
The velocity field is a specified divergence-free (so the flow field is incompressible) function of space and time. The initial scalar field is a Gaussian profile. To integrate these equations on a given level, we use a simple conservative update,
where the velocities on faces are prescribed functions of space and time, and the scalars on faces are computed using a Godunov advection integration scheme. The fluxes in this case are the face-centered, time-centered “\(\phi u\)” and “\(\phi v\)” terms.
We use a subcycling-in-time approach where finer levels are advanced with smaller time steps than coarser levels, and then synchronization is later performed between levels. More specifically, the multi-level procedure can most easily be thought of as a recursive algorithm in which, to advance level \(\ell\), \(0\le\ell\le\ell_{\rm max}\), the following steps are taken:
Advance level \(\ell\) in time by one time step, \(\Delta t^{\ell}\), as if it is the only level. If \(\ell>0\), obtain boundary data (i.e. fill the level \(\ell\) ghost cells) using space- and time-interpolated data from the grids at \(\ell-1\) where appropriate.
If \(\ell<\ell_{\rm max}\)
Advance level \((\ell+1)\) for \(r\) time steps with \(\Delta t^{\ell+1} = \frac{1}{r}\Delta t^{\ell}\).
Synchronize the data between levels \(\ell\) and \(\ell+1\).
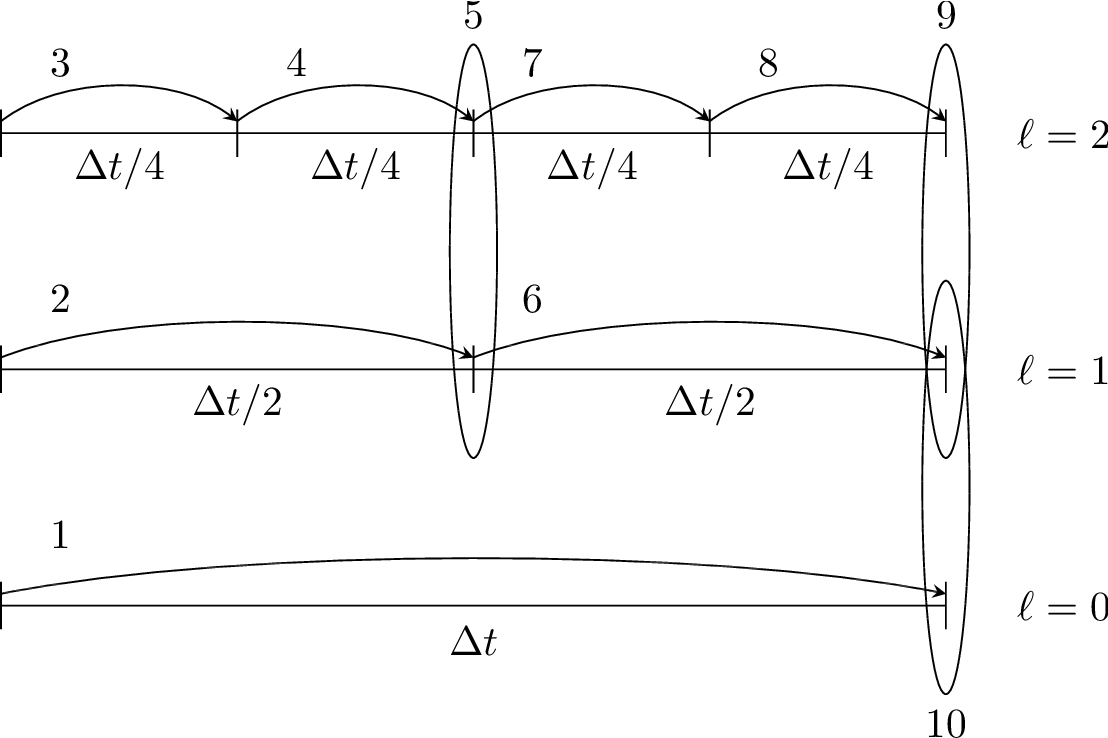
Fig. 3 Schematic of subcycling-in-time algorithm.
Specifically, for a 3-level simulation, as depicted in Schematic of subcycling-in-time algorithm.:
Integrate \(\ell=0\) over \(\Delta t\).
Integrate \(\ell=1\) over \(\Delta t/2\).
Integrate \(\ell=2\) over \(\Delta t/4\).
Integrate \(\ell=2\) over \(\Delta t/4\).
Synchronize levels \(\ell=1,2\).
Integrate \(\ell=1\) over \(\Delta t/2\).
Integrate \(\ell=2\) over \(\Delta t/4\).
Integrate \(\ell=2\) over \(\Delta t/4\).
Synchronize levels \(\ell=1,2\).
Synchronize levels \(\ell=0,1\).
For the scalar field, we keep track of volume and time-weighted fluxes at coarse-fine interfaces.
We accumulate area and time-weighted fluxes in FluxRegister objects, which can be
thought of as special boundary FABsets associated with coarse-fine interfaces.
Since the fluxes are area and time-weighted (and sign-weighted, depending on whether they
come from the coarse or fine level), the flux registers essentially store the extent by
which the solution does not maintain conservation. Conservation only happens if the
sum of the (area and time-weighted) fine fluxes equals the coarse flux, which in general
is not true.
The idea behind the level \(\ell/(\ell+1)\) synchronization step is to correct for sources of mismatch in the composite solution:
The data at level \(\ell\) that underlie the level \(\ell+1\) data are not synchronized with the level \(\ell+1\) data. This is simply corrected by overwriting covered coarse cells to be the average of the overlying fine cells.
The area and time-weighted fluxes from the level \(\ell\) faces and the level \(\ell+1\) faces do not agree at the \(\ell/(\ell+1)\) interface, resulting in a loss of conservation. The remedy is to modify the solution in the coarse cells immediately next to the coarse-fine interface to account for the mismatch stored in the flux register (computed by taking the coarse-level divergence of the flux register data).
Code Structure
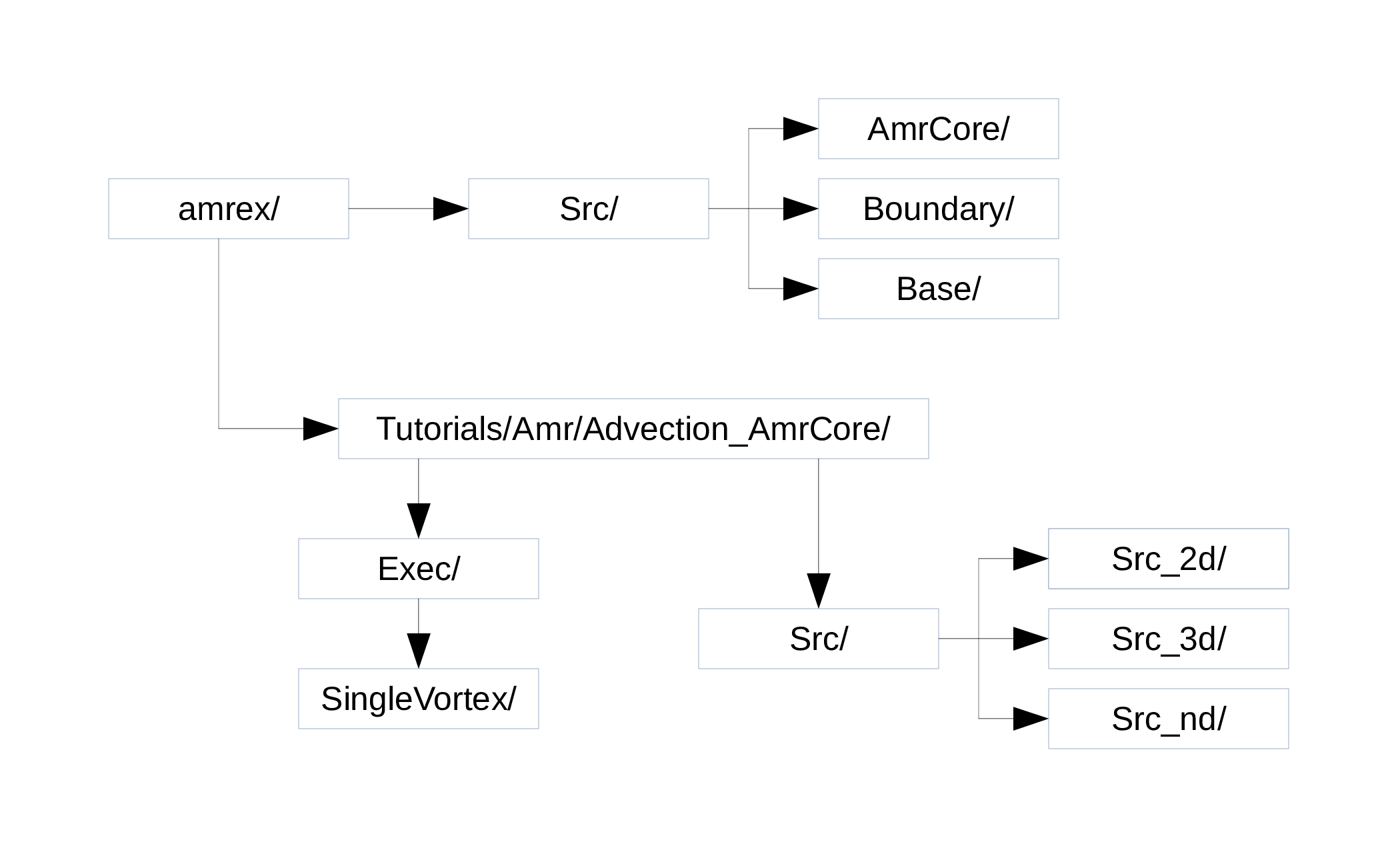
Fig. 4 Source code tree for the AmrAdvection_AmrCore example.
The figure above shows the source tree for the example.
amrex/Src/Base/Base AMReX library.Boundary/An assortment of classes for handling boundary data.AmrCore/AMR data management classes, described in more detail above.
Advection_AmrCore/Srccontains source code specific to this example. Most notably, it includes theAmrCoreAdvclass, which is derived fromAmrCore. The subdirectoriesSrc_2dandSrc_3dcontain dimension-specific routines.Src_ndcontains dimension-independent routines.Execcontains a makefile so that users can write other examples besidesSingleVortex.SingleVortexbuilds the code by editing theGNUmakefileand runningmake. There is also problem-specific source code here for initialization and for specifying the velocity field used in this simulation.
Here is a high-level pseudo-code of the flow of the program:
/* Advection_AmrCore Pseudocode */
main()
AmrCoreAdv amr_core_adv; // build an AmrCoreAdv object
amr_core_adv.InitData() // initialize data on all levels
AmrCore::InitFromScratch()
AmrMesh::MakeNewGrids()
AmrMesh::MakeBaseGrids() // define level 0 grids
AmrCoreAdv::MakeNewLevelFromScratch()
/* allocate phi_old, phi_new, t_new, and flux registers */
initdata() // fill phi
if (max_level > 0) {
do {
AmrMesh::MakeNewGrids()
/* construct next finer grid based on tagging criteria */
AmrCoreAdv::MakeNewLevelFromScratch()
/* allocate phi_old, phi_new, t_new, and flux registers */
initdata() // fill phi
} while (finest_level < max_level);
}
amr_core_adv.Evolve()
loop over time steps {
ComputeDt()
timeStep() // advance a level
/* check regrid conditions and regrid if necessary */
Advance()
/* copy phi into a MultiFab and fill ghost cells */
/* advance phi */
/* update flux registers */
if (lev < finest_level) {
timeStep() // recursive call to advance the next-finer level "r" times
/* check regrid conditions and regrid if necessary */
Advance()
/* copy phi into a MultiFab and fill ghost cells */
/* advance phi */
/* update flux registers */
reflux() // synchronize lev and lev+1 using FluxRegister divergence
AverageDown() // set covered coarse cells to be the average of fine
}
}
The AmrCoreAdv Class
This example uses the class AmrCoreAdv, which is derived from the class AmrCore
(which is derived from AmrMesh). The function definitions/implementations
are given in AmrCoreAdv.H/cpp.
FluxRegisters
The function AmrCoreAdv::Advance() calls the Fortran
subroutine, advect (in ./Src_xd/Adv_xd.f90). advect computes
and returns the time-advanced state as well as the fluxes used to update the state.
These fluxes are used to set or increment the flux registers.
// increment or decrement the flux registers by area and time-weighted fluxes
// Note that the fluxes have already been scaled by dt and area
// In this example we are solving phi_t = -div(+F)
// The fluxes contain, e.g., F_{i+1/2,j} = (phi*u)_{i+1/2,j}
// Keep this in mind when considering the different sign convention for updating
// the flux registers from the coarse or fine grid perspective
// NOTE: the flux register associated with flux_reg[lev] is associated
// with the lev/lev-1 interface (and has grid spacing associated with lev-1)
if (do_reflux) {
if (flux_reg[lev+1]) {
for (int i = 0; i < BL_SPACEDIM; ++i) {
flux_reg[lev+1]->CrseInit(fluxes[i],i,0,0,fluxes[i].nComp(), -1.0);
}
}
if (flux_reg[lev]) {
for (int i = 0; i < BL_SPACEDIM; ++i) {
flux_reg[lev]->FineAdd(fluxes[i],i,0,0,fluxes[i].nComp(), 1.0);
}
}
}
The synchronization is performed at the end of AmrCoreAdv::timeStep:
if (do_reflux)
{
// update lev based on coarse-fine flux mismatch
flux_reg[lev+1]->Reflux(*phi_new[lev], 1.0, 0, 0, phi_new[lev]->nComp(),
geom[lev]);
}
AverageDownTo(lev); // average lev+1 down to lev
Regridding
The regrid function belongs to the AmrCore class (it is virtual – in this
tutorial we use the implementation in AmrCore).
At the beginning of each time step, we check whether we need to regrid.
In this example, we use regrid_int and keep track of how many times each level
has been advanced. When any given level \(\ell<\ell_{\rm max}\) has been
advanced a number of times equal to a multiple of regrid_int, we call the regrid function.
void
AmrCoreAdv::timeStep (int lev, Real time, int iteration)
{
if (regrid_int > 0) // We may need to regrid
{
// regrid changes level "lev+1" so we don't regrid on max_level
if (lev < max_level && istep[lev])
{
if (istep[lev] % regrid_int == 0)
{
// regrid could add newly refined levels
// (if finest_level < max_level)
// so we save the previous finest level index
int old_finest = finest_level;
regrid(lev, time);
// if there are newly created levels, set the time step
for (int k = old_finest+1; k <= finest_level; ++k) {
dt[k] = dt[k-1] / MaxRefRatio(k-1);
}
}
}
}
Central to the regridding process is the concept of “tagging” cells that need refinement.
ErrorEst is a pure virtual function of AmrCore, so each application code must
contain an implementation. In AmrCoreAdv.cpp the ErrorEst function is essentially an
interface to a Fortran routine that tags cells (in this case, state_error in
Src_nd/Tagging_nd.f90). Note that this code uses tiling.
// tag all cells for refinement
// overrides the pure virtual function in AmrCore
void
AmrCoreAdv::ErrorEst (int lev, TagBoxArray& tags, Real time, int ngrow)
{
static bool first = true;
static Vector<Real> phierr;
// only do this during the first call to ErrorEst
if (first)
{
first = false;
// read in an array of "phierr", which is the tagging threshold
// in this example, we tag values of "phi" which are greater than phierr
// for that particular level
// in subroutine state_error, you could use more elaborate tagging, such
// as more advanced logical expressions, or gradients, etc.
ParmParse pp("adv");
int n = pp.countval("phierr");
if (n > 0) {
pp.getarr("phierr", phierr, 0, n);
}
}
if (lev >= phierr.size()) return;
const int clearval = TagBox::CLEAR;
const int tagval = TagBox::SET;
const Real* dx = geom[lev].CellSize();
const Real* prob_lo = geom[lev].ProbLo();
const MultiFab& state = *phi_new[lev];
#ifdef AMREX_USE_OMP
#pragma omp parallel
#endif
{
Vector<int> itags;
for (MFIter mfi(state,true); mfi.isValid(); ++mfi)
{
const Box& tilebox = mfi.tilebox();
TagBox& tagfab = tags[mfi];
// We cannot pass tagfab to Fortran because it is BaseFab<char>.
// So we are going to get a temporary integer array.
// set itags initially to 'untagged' everywhere
// we define itags over the tilebox region
tagfab.get_itags(itags, tilebox);
// data pointer and index space
int* tptr = itags.dataPtr();
const int* tlo = tilebox.loVect();
const int* thi = tilebox.hiVect();
// tag cells for refinement
state_error(tptr, AMREX_ARLIM_3D(tlo), AMREX_ARLIM_3D(thi),
BL_TO_FORTRAN_3D(state[mfi]),
&tagval, &clearval,
AMREX_ARLIM_3D(tilebox.loVect()), AMREX_ARLIM_3D(tilebox.hiVect()),
AMREX_ZFILL(dx), AMREX_ZFILL(prob_lo), &time, &phierr[lev]);
//
// Now update the tags in the TagBox in the tilebox region
// to be equal to itags
//
tagfab.tags_and_untags(itags, tilebox);
}
}
}
The state_error subroutine in Src_nd/Tagging_nd.f90 in this example
is simple:
subroutine state_error(tag,tag_lo,tag_hi, &
state,state_lo,state_hi, &
set,clear,&
lo,hi,&
dx,problo,time,phierr) bind(C, name="state_error")
implicit none
integer :: lo(3),hi(3)
integer :: state_lo(3),state_hi(3)
integer :: tag_lo(3),tag_hi(3)
double precision :: state(state_lo(1):state_hi(1), &
state_lo(2):state_hi(2), &
state_lo(3):state_hi(3))
integer :: tag(tag_lo(1):tag_hi(1), &
tag_lo(2):tag_hi(2), &
tag_lo(3):tag_hi(3))
double precision :: problo(3),dx(3),time,phierr
integer :: set,clear
integer :: i, j, k
! Tag on regions of high phi
do k = lo(3), hi(3)
do j = lo(2), hi(2)
do i = lo(1), hi(1)
if (state(i,j,k) .ge. phierr) then
tag(i,j,k) = set
endif
enddo
enddo
enddo
end subroutine state_error
FillPatch
This example has two functions, AmrCoreAdv::FillPatch and AmrCoreAdv::CoarseFillPatch,
that make use of functions in AmrCore/AMReX_FillPatchUtil.
In AmrCoreAdv::Advance, we create a temporary MultiFab called Sborder, which
is essentially \(\phi\) but with ghost cells filled in. The valid and ghost cells are filled in from
actual valid data at that level, space-time interpolated data from the next-coarser level,
neighboring grids at the same level, or domain boundary conditions
(for examples that have non-periodic boundary conditions).
MultiFab Sborder(grids[lev], dmap[lev], S_new.nComp(), num_grow);
FillPatch(lev, time, Sborder, 0, Sborder.nComp());
Several other calls to fillpatch routines are hidden from the user in the regridding process.